














【テクノ言語とG言語のご紹介②】運転プログラム設定編
テクノの野崎です。
昨日から始まりました「テクノ言語とG言語のご紹介」シリーズ。
今回は運転プログラムをどのように設定するのかについてご紹介します。
※右図はPLCモーションコントローラ(PLMC-M3EX)を例にご紹介します。
※他コントローラでも同様の操作で設定可能です。
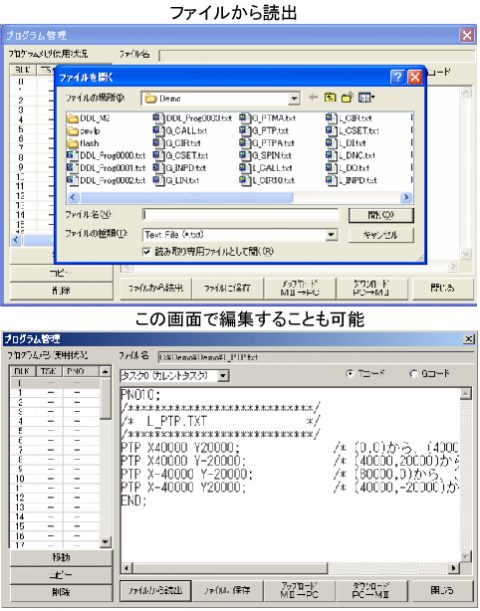
テクノの「セッティングPCソフト」にて運転プログラムを設定します。
右図はセッティングPCソフトの一部の画面です。
エディタ上で作成したテクノ言語やG言語の運転プログラムファイルを読出すことや
読出したファイル内容をセッティングPCソフト上で編集することなどが可能です。
もちろん、ファイルを読出さずにセッティングPCソフト上でゼロから作成することも可能です。
【関連資料】
セッティングPCソフトには「サンプル運転プログラム」がついています。ご興味のある方は是非お読み下さい。
※閲覧には会員登録が必要です。
テクノ言語にご興味のある方:テクノ言語運転プログラムをぜひ、ご確認ください。
テクノ言語/G言語の対応リストもあります。
【テクノ言語とG言語のご紹介①】
ご無沙汰しております。
テクノの野崎です。
桜が満開となりましたが、あいにくこちらでは雨が降っています。
毎年、桜の時期になると気持ちが晴れやかになりますね。
(花粉がなければ最高なのですが)
今回はテクノ言語とG言語についてご紹介したいと思います。
G言語とは主にNC(工作機など)で用いられる運転言語です。
1行で1動作を指定します。
GXX(XXは数字)により運転内容が決まり、軸の目標位置や速度を指定します。
テクノ言語はその名の通り、テクノ製品で用いられる言語です。
記述形式はG言語と同じで1行1動作です。
細かい違いはありますが、大きな違いは運転内容が分かりやすいという点です。
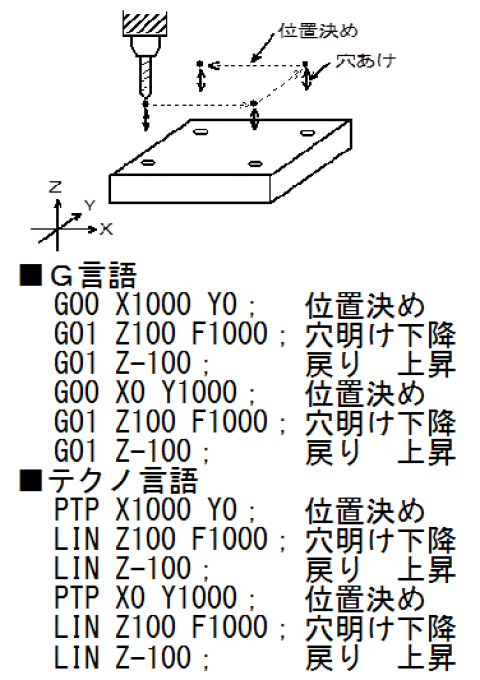
右図は「穴開けマシン」をイメージしたG言語とテクノ言語の例を載せています。
テクノ言語は"PTP(Point To Point:位置決め)"のように
比較的、理解し易い命令となっています。
テクノのモーションコントローラはG言語だけでなく
G言語を知らない方でも使いやすいようテクノ言語もご用意してます。
【関連資料】
テクノ言語にご興味のある方:テクノ言語運転プログラムを是非、ご確認ください。
テクノ言語/G言語の対応リストもあります。
次回はこの運転言語をどの様に使うかについて書いてみたいと思います。
象限突起の事象&解決策[モーションコントローラ]
![象限突起の事象&解決策[モーションコントローラ]](/upload/1392614361-368697_1.jpg)
テクノの野崎です。
2/14(金)に降った大雪が7割ほど溶けてきました。
2/8(土)に大雪があり、1週間もしない内に再度大雪となり大変な1週間でしたね。
私はその間、インフルエンザにかかり別の意味で大変な1週間を過ごしていました。
雪は溶けてきましたが、早朝は路面凍結があるので気をつけてください。
あと、インフルエンザにも気をつけてください。
さて、前回「輪郭制御を向上させるには!?② 【モーションコントローラ】」にて円弧縮小の改善方法をご紹介しました。
そこでご紹介した図(右図参照)にて「Y軸+方向の象限突起」にお気づきの方がいるかと思います。
今回はこの象限突起について焦点をあててみます。
実はこの突起は4μm程度の微小な誤差となっています。
位置単位:1パルス=10nm
円弧半径:R=100mm
速度 :F=500mm/s (5×10^7pps)
円弧精度:誤差1μm以下に改善
この円弧は、図の下からスタートして反時計回りで一周しています。
象限突起のメカニズムは、機構やサーボのトルク/速度ループ制御に深く・複雑に関係しています。
モーションコントローラによる補償や制御は正直なところ困難です。
サーボアンプでの改善が期待されます。
実は、X軸はリニアモーターを使用し、Y軸は回転型モーターとボールネジを使用しています。
つまり、象限突起を改善・解消するためにはリニアモーターが有効となります。
象限突起で頭を悩まされている方や象限突起は絶対発生してはいけない装置ではリニアモーターを検討してみてください。
輪郭制御を向上させるには!?② 【モーションコントローラ】
テクノの野崎です。
前回は輪郭制御において「円弧の縮小」と「円弧のひずみ」による軌跡誤差をお話ししました。今回はその軌跡誤差の改善案をご紹介します。
●円弧の縮小を改善
①機構の剛性を高める
前回、位置ループゲインKp(サーボ系の応答)を高くすることで円弧縮小を
軽減できることを近似式からお話ししました。
これには機構の剛性を高めることが必要です。
機構の剛性はこのようなことで高めることができます。
・バックラッシュなどの不感帯をなくす
・機構のたわみやバネ要素を小さくする
・慣性や重量を小さくする
・摩擦などの外乱を小さくする
②補間加減速の時定数を小さくする
補間加減速も位置ループゲイン(Kp)と同様の仕組みで円弧の縮小を
発生させます。補間加減速の時定数(s)=1/ゲイン(r/s)の式となるためです。
つまり、補間加減速の時定数を小さくすることで円弧の縮小を
改善できます。
軌跡精度を良くしたい場合、以下の順番で補間加減速の時定数を
最小にしてください。
1、補間時定数=0msec
2、直線型補間加減速
3、指数型補間加減速
※同じ時定数でも直線型の場合、指数型補間加減速と比べて
軌跡の内回りへの影響が小さいです。
③補間前加減速(自動コーナーオーバーライド)※オプション機能※
補間の連続での速度変化(加速度)の度合いに応じて、自動的に最適な減速/加速をします。
速度変化が小さなコーナーでは減速しません。
④形状補正※オプション機能※
サーボ系の遅れを補償した指令をします。フィードフォワード制御に似た機能です。
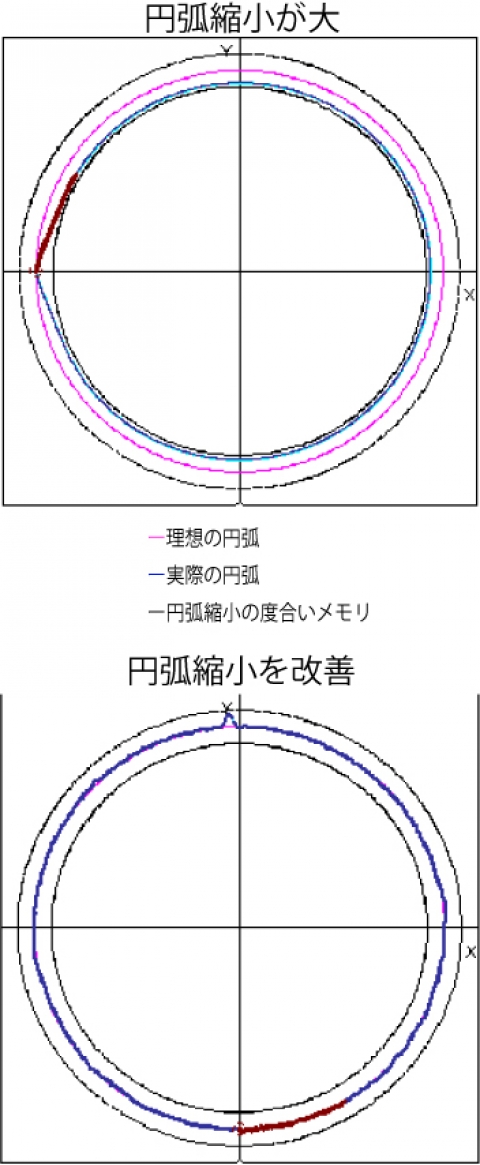
これら①~④を実施した場合の効果を右図に示しています。
上図の「円弧縮小が大」では理想の円弧(ピンク線)と比べ実践(青線)が内側に縮小していることが分かります。
しかし、下図では①~④を実施したため、実践(青線)が理想の円弧(ピンク線)と同等であることが分かります。
なお、これらの計測はテクノのモーションコントローラのTPCロギングと解析ソフトにより計測しています。
●円弧のひずみを改善
①位置ループゲインのバランス
多軸軌跡制御では、各軸の位置ループゲインが一致していることが重要です。
各軸の位置ループゲインが異なると非常に大きな軌跡誤差が生じます。
また、位置ループゲインを限界以上にすると発振などの異常動作となるため
各軸の位置ループゲインの最小値に合わせることになります。
新年のご挨拶
新年のご挨拶
新年、あけましておめでとうございます。
昨年は皆様より多大なるご支援をいただき、誠にありがとうございました。
本年もどうぞ宜しくお願い申し上げます。
昨年はテクノにとって、大きな節目を迎えました。
MECHATROLINKとEtherCATに対応したモーションコントローラ"PCベースファインモーション"と"PCベースモーションライブラリ"のご提供を始めました。
"PCベースファインモーション"は、大手ユーザ様の新生産技術の研究用プラットフォームとしてご活用頂いております。今後の展開が楽しみです。
"PCベースモーションライブラリ"は、テクノにとって新しい市場へのチャレンジです。半導体製造や多軸位置決めの市場においてご活用頂けると考えております。海外のお客様も含め、引き合いを頂いており、こちらも今後の展開が楽しみです。
MECHATROLINKとEtherCATに対応することで、お客様のサーボ選択の自由度が広がりました。
テクノとしては今まで以上にサーボメーカ各社との連携が重要と考えております。
引き続きお客様のベストな提案が出来るよう尽力して参ります。
また、PLCモーションは根強いニーズがあり、ワンボード型や組込型のコントローラも新規・既存のお客様よりご注文を頂いております。
昨年は「ロボット」、「巻線機」、「射出制御」、「テンション制御のような力やトルクの制御」など、幅広い分野にてご利用頂き誠にありがとうございました。
国内の生産設備は全体的に縮小しているかもしれません。そのような中で、テクノは低価格のみの装置が勝ち残るのではなく、高度で独自性、つまりいかに差別化を図り、いかに高付加価値のある装置を提供できるかが重要なテーマと考えております。
モーションコントローラの分野においてこのような生産設備のお手伝いが出来るよう、精進して参ります。
2014年1月9日
株式会社 テクノ
代表取締役 山中 守

- お電話でのお問い合わせ【受付時間】平日9:00~17:00

- メールでのお問い合わせ24時間受付 / 電話受付時間外のお問い合わせはこちらから

