














テクノ年末年始休業のご案内
テクノ年末年始休業のご案内
2020年12月7日
株式会社テクノ
拝啓 時下益々ご清栄のこととお慶び申し上げます。平素は格別のお引立てを賜り、厚く御礼申し上げます。
誠に勝手ながら、年末年始の休業のため、下記期間におけるお問合せ対応及び発送業務をお休みさせていただきます。
何卒ご了承くださいますようお願い申し上げます。
■年末年始休業期間■
2020年12月26日(土)~2021年1月4日(月)
■お問合せ・発送業務対応について■
お休み期間中にいただいたお問合せ・発送業務依頼は、
2021年1月5日(火)より順次ご対応させていただきます。
回答までにお時間をいただく場合がございますが、予めご了承下さい。
来年も、本年同様お客様にご満足いただける製品とサービスの提供を目指し、社員一同より一層努力して参ります。今後共、変わらぬご愛顧の程、宜しくお願い申し上げます。
敬具
Python向けファインモーション操作ライブラリ「pyfinemotion」のリリース
テクノの大澤です。
久しぶりの技術コラムは私からご紹介します。
この度、Pythonからファインモーションを操作できるPythonライブラリ「pyfinemotion」をリリースいたしました。
◆pyfinemotionの特徴
- Pythonから高精度のモーション制御、サーボ制御、IO制御を行うことができます。
- オプション購入が必要な一部の動作を除く全ての動作をAPIとして実装しています。
- PythonicなAPIとして設計しており学習コストがほとんどかかりません。
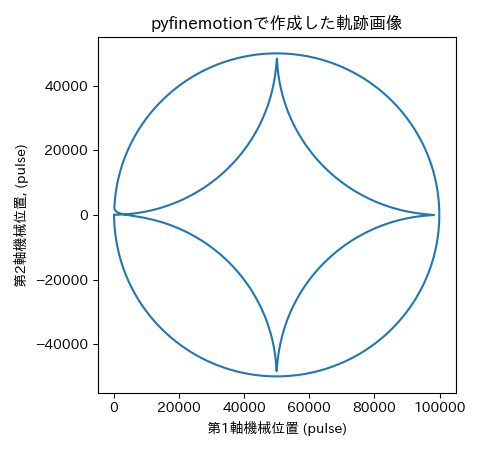
- 軌跡やアラームのリアルタイムモニタリングを間単に設定できます。
- コンパイル不要なため、実験や研究目的に最適です。
- 画像処理、機械学習など様々なPythonライブラリと組み合わせることで、お客様独自のアプリケーションを容易に作成できます。
◆pyfinemotionの動作環境
- 動作OS: Windows7 以降のWindos OS(32bit, 64bit対応)
- Pythonバージョン Python 3.0以降
- 依存ライブラリ: numpy、pandas
- 対応機種: SLM8000、PLMC-M3EX、RTMC64-EC/M3
◆pyfinemotion入手方法
ファインモーション購入時に付属するCDから無料で入手可能です。
既にファインモーションを購入済みの方はお問い合わせ下さい。
◆APIリファレンス
APIリファレンスとサンプルプログラムを提供しています。
よろしければご確認下さい。
◆サンプルプログラム例
from pyfinemotion import Slm8000
#操作クラスインスタンス化
pyslm = Slm8000(inifilepath="./slm8000drv.ini")
#通信開始
pyslm.init_comm()
#ステータス確認
status = pyslm.read_status()
#タスク0の状態を確認
print(status.get_taskinfo(0))
#位置決め実行
pyslm.exec_positioning(task=0, X=1000)
#直線補間実行
pyslm.exec_linear_interpolation(task=0, feed=10000, X=10000, Y=-1000)
#プログラム書込み
pyslm.write_program_from_file("./Gcode.txt", task=0, programblock=1, code="Gcode")
#プログラム選択
pyslm.select_program(task=0, program=1)
#プログラム実行
pyslm.start_program(task=0)
#オーバーライドの変更
pyslm.change_override(task=0, override=50)
#マクロ変数の書込み
pyslm.write_macrovariable(task=0, num=6500, value=2000)
#ポイントテーブルの読込
print(pyslm.read_pointtables(task=0, startnum=1, size=100))
#軸のインタロック
pyslm.set_interlock (task=0, X=True, Y=True)
#インタロックの解除
pyslm.set_interlock(0, ALL=False)
#通信終了
pyslm.quit_comm()
ご興味、ご不明点がありましたらお気軽にお問い合わせください。
テクノ夏季休業のご案内
テクノ夏季休業のご案内
2020年7月28日
株式会社テクノ
拝啓 時下益々ご清栄のこととお慶び申し上げます。平素は格別のお引立てを賜り、厚く御礼申し上げます。
誠に勝手ながら、下記の期間、夏季休業期間のためお問合せ対応及び発送業務をお休みさせていただきます。
何卒ご了承くださいますようお願い申し上げます。
■休業期間■
2020年8月8日(土)~2020年8月16日(日)
■お問合せ・発送業務対応について■
2020年8月8日(土)~2020年8月16日(日)にいただいたお問合せ・発送業務依頼は、
2020年8月17日(月)より順次、対応させていただきます。
回答までにお時間をいただく場合がございますが、予めご了承下さい。
お客様にご満足いただける製品とサービスの提供を目指し、社員一同より一層努力して参ります。
今後共、変わらぬご愛顧の程、宜しくお願い申し上げます。
敬具
新型コロナウイルスに伴う対応について②
緊急事態宣言が解除されましたがテクノは引き続き、従業員およびお客様、協力企業の皆様の安全を最優先し以下の対応を継続いたします。
お客様、協力企業の皆様に対しては多大なるご迷惑をおかけいたしますが、ご理解、ご協力のほどよろしくお願い申し上げます。
・テクノ従業員が37℃以上の熱がある場合、出社を禁止。
また、出張およびテクノ社内での打ち合わせなども中止。
(お客様に対しては当日のご連絡となることが考えられます。)
・37℃以上ある方の受入を原則延期
・テレビ会議や電話会議の実施をお願い
・テクノ社員のマスク着用およびアルコール殺菌を徹底
・来社いただいた方へのマスク着用およびアルコール殺菌を推奨
テクノは当社従業員ならびにお客様、協力企業の皆様の安全確保を最優先し、今後も感染状況を注視しながら、対応を検討・実施してまいります。
以上
テクノGW休業のご案内
テクノGW休業のご案内
2020年4月10日
株式会社テクノ
拝啓 時下益々ご清栄のこととお慶び申し上げます。平素は格別のお引立てを賜り、厚く御礼申し上げます。
誠に勝手ながら、GW休業のため、下記期間におけるお問合せ対応及び発送業務をお休みさせていただきます。
何卒ご了承くださいますようお願い申し上げます。
■GW休業期間■
2020年4月29日(水)~2019年5月6日(水)
■お問合せ・発送業務対応について■
お休み期間中にいただいたお問合せ・発送業務依頼は、
2020年5月7日(木)より順次ご対応させていただきます。
回答までにお時間をいただく場合がございますが、予めご了承下さい。
お客様にご満足いただける製品とサービスの提供を目指し、社員一同より一層努力して参ります。
今後共、変わらぬご愛顧の程、宜しくお願い申し上げます。
敬具

- お電話でのお問い合わせ【受付時間】平日9:00~17:00

- メールでのお問い合わせ24時間受付 / 電話受付時間外のお問い合わせはこちらから

