














ロボット
XYθ平面パラレルメカニズム制御と画像処理の連携
- 背景
-

XYθ平面パラメカでは、3軸のパラレル制御が必須です。
従来のサーボコントローラには、機構変換の機能がなく、直交系のXYθで動作指令が出来ませんでした。
また、目標位置だけの機構変換の計算をした場合は、位置決めはできても、正確な軌跡にはなりませんでした。
さらに、生産現場の自動機として用いるため、
・G言語やロボット言語が使えず、単なる位置決めレベルであること
・修理や検査するための画像処理やPCとの連携がユーザ任せになっていること
が大きな問題となっていました。
- 課題
-
・直交系(XYθ)で指令する
・高精度な軌跡制御で緻密に動作する
・G言語やロボット言語に対応し自動機(生産機)として動作する
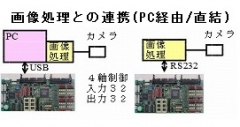
・画像処理と簡単に連携する
- 解決&メリット
-
テクノのワンボードモーションコントローラ(SLM4000)で解決しました。
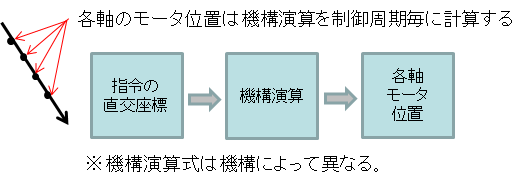
・専用の機構変換処理をSLM4000内に内蔵して、直交系(XYθ)で指令を実現
・制御周期毎に機構変換処理を行うことで、高精度な軌跡制御を実現
・単なる位置決めだけではなく高精度な輪郭制御を実現
・G言語やテクノ言語により、自動機として活用
・その他にも自動機制御に役立つ機能を実現
・画像処理との連携を可能とし、ワークアライメント調整などを実現
- 関連資料
-

- お電話でのお問い合わせ【受付時間】平日9:00~17:00

- メールでのお問い合わせ24時間受付 / 電話受付時間外のお問い合わせはこちらから

