














ロボット
垂直多関節ロボットを自作・制御盤なしでコストダウン
- 背景
-
一般の産業用ロボットは、機構と制御装置のセット販売です。
機械・設備メーカが自社製ロボットを設計・製作する場合、コントローラ単体の購入は一般には困難です。
また、仮に汎用NCを購入しても、ロボット機構に応じた順・逆変換の機能がないので直交系で指令する運転は不可能です。
機械は製作できても、コントローラを開発するには膨大な工数がかかります。
そのため、自社ロボットに応じて機構変換機能を内在できる汎用的なロボットコントローラが必要でした。
さらに、生産機としては、加工・搬送・組立など作業に直結する自動機としての機能も必要です。
- 課題
-
・自社のロボット機構や運転目的にあった、モーションコントローラを導入し、独自性を発揮させたい
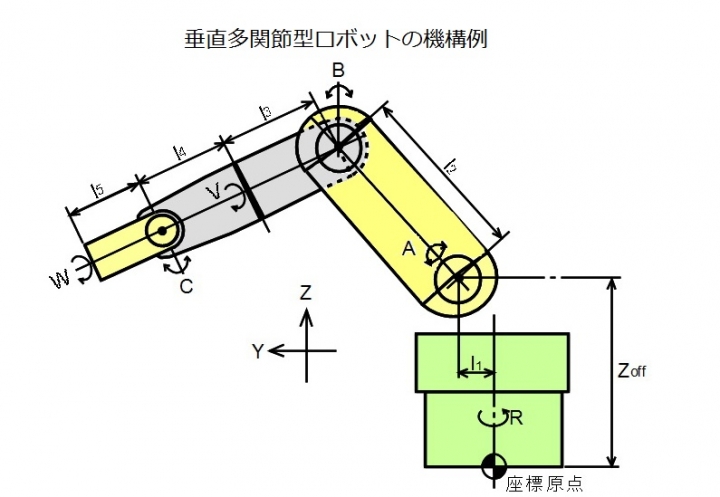
・直交座標で指令・操作するために6軸の機構変換機能が必須
・ロボット言語とG言語を併用したい(G言語も使いたい)
・専用CAMから直接に運転したい
または、CAM出力ファイルで運転したい
・組立・搬送ロボット以上の動作精度で、精密加工にも使いたい
- 解決策&メリット
-

◆垂直多関節ロボット機構(6軸)に応じた機構変換処理を実現
◆直交系で指令して、なめらかで正確な軌跡を実現
◆G言語やテクノ言語〈ロボット言語〉で簡単に運転が可能
◆一般の自動機として生産現場で活躍できる幅広い機能を内蔵
◆搬送・組立のみならず、加工にも使える軌跡精度の高さを実現
◆サーボアンプ一体型コントローラでは、機体にそのまま組込めて制御盤が不要
-
- 関連資料
-
モーションコントローラとサーボアンプ6軸が一体構造となっています。このままマシンに組込めます。
製品や機能、見積り依頼などお気軽にお問い合わせ下さい。
お急ぎの場合は04-2964-3677までおかけ下さい。

- お電話でのお問い合わせ【受付時間】平日9:00~17:00

- メールでのお問い合わせ24時間受付 / 電話受付時間外のお問い合わせはこちらから

