














半導体製造
半導体製造装置の実例!コスト1/2・パフォーマンス2倍を達成!
- 背景
-
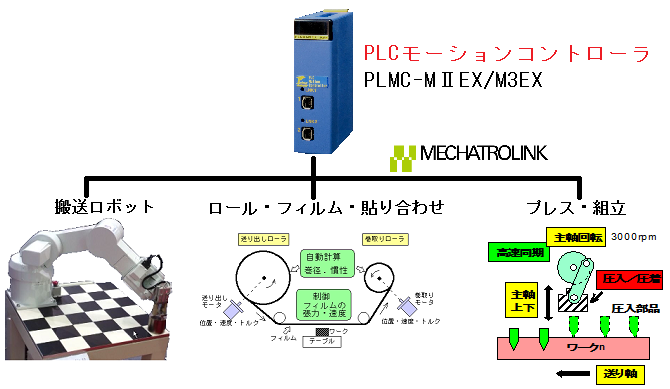
半導体製造設備には搬送、組立て、貼り合わせ、カッティング、検査など多岐にわたる装置が混在している。
今までは、各装置にコントローラがあり、上位のPLCが各々コントローラ/装置を制御していた。
最近では搬送や組立てにロボット(垂直多関節・スカラー・デルタ型/げんこつなど)を利用するところも多く、本事例においても市販のロボットを利用していた。
従来、半導体製造設備では、完成品ロボット(垂直多関節・スカラー・デルタ型/げんこつなど)を各ロボットメーカーから購入して組み合わせていた。しかし、"コスト高"や"不自由度"(自ら機能改善ができない)などの点で困っていた。そこで、ロボット機構を内製化し、ロボット制御を担当してくれるモーションコントローラメーカーを探していた。
また、フィルムやテープの貼り合わせなどでは、送り出しローラや巻き取りローラの"力制御"や微妙な"多軸制御"などの複雑な制御を必要とする機構が増えてきた。単純動作の多軸システムでなく、各ステーションの同期や緻密な動作の必要性が高くなっており、これらを達成できるモーションコントローラを探していた。
複雑な制御を達成することで海外メーカーに負けないための差別化が急務であった。
- 課題&要望
-
・内製化したロボットの機構式をモーションコントローラ(制御ソフト)に組込んで欲しい
・ロボット、組立て、貼り合わせなどの装置を密接に連携/同期させて運転したい
・フィルム張力や力の制御、フィルムロール慣性の変化に対する補償制御など、
高度なモーション制御も必要
(ロール径の変化は、速度・張力・慣性力など全てに大きく影響する。
それを正確に補償制御しなければ、最適なタクトと生産性が確保できないため)
- 解決策&メリット
-
PLCモーションコントローラで本機とロボットを一括制御することで解決しました。
★提案
◆センサーやスイッチなどはPLC(ラダー)で制御し、難しいモーション制御(プレス・各ロボットなど)をPLCモーションコントローラが担当
◆PLCモーションコントローラとPLC間でデータの共有が可能
◆MECHATROLINKにより複数のステーションを一括管理(16軸/マルチタスク)をすることで、各装置の連携や同期を達成
◆さらに多軸拡張が必要な場合は、PLCモーションコントローラを拡張することで対応
★メリット
◆購入費が今までの1/2に低減
◆パフォーマンスが2倍にUP!(タクトタイムや生産性UP)
◆力制御や完全同期制御、ロボット機構演算など高度なモーション制御を簡単にテクノが実現
◆各装置を同じ運転プログラム言語で制御することで運転プログラム作成を簡単化
◆ロボット機構に応じた機構式をテクノがPLCモーションコントローラへ導入
◆海外メーカーとの競争に勝つための技術を蓄積(あらゆる機構を一般の自動機として運転できるノウハウなど)
◆最先端の生産技術を達成
-
- 関連資料

- お電話でのお問い合わせ【受付時間】平日9:00~17:00

- メールでのお問い合わせ24時間受付 / 電話受付時間外のお問い合わせはこちらから

