














象限突起の事象&解決策[モーションコントローラ]
![象限突起の事象&解決策[モーションコントローラ]](/upload/1392614361-368697_1.jpg)
テクノの野崎です。
2/14(金)に降った大雪が7割ほど溶けてきました。
2/8(土)に大雪があり、1週間もしない内に再度大雪となり大変な1週間でしたね。
私はその間、インフルエンザにかかり別の意味で大変な1週間を過ごしていました。
雪は溶けてきましたが、早朝は路面凍結があるので気をつけてください。
あと、インフルエンザにも気をつけてください。
さて、前回「輪郭制御を向上させるには!?② 【モーションコントローラ】」にて円弧縮小の改善方法をご紹介しました。
そこでご紹介した図(右図参照)にて「Y軸+方向の象限突起」にお気づきの方がいるかと思います。
今回はこの象限突起について焦点をあててみます。
実はこの突起は4μm程度の微小な誤差となっています。
位置単位:1パルス=10nm
円弧半径:R=100mm
速度 :F=500mm/s (5×10^7pps)
円弧精度:誤差1μm以下に改善
この円弧は、図の下からスタートして反時計回りで一周しています。
象限突起のメカニズムは、機構やサーボのトルク/速度ループ制御に深く・複雑に関係しています。
モーションコントローラによる補償や制御は正直なところ困難です。
サーボアンプでの改善が期待されます。
実は、X軸はリニアモーターを使用し、Y軸は回転型モーターとボールネジを使用しています。
つまり、象限突起を改善・解消するためにはリニアモーターが有効となります。
象限突起で頭を悩まされている方や象限突起は絶対発生してはいけない装置ではリニアモーターを検討してみてください。
輪郭制御を向上させるには!?② 【モーションコントローラ】
テクノの野崎です。
前回は輪郭制御において「円弧の縮小」と「円弧のひずみ」による軌跡誤差をお話ししました。今回はその軌跡誤差の改善案をご紹介します。
●円弧の縮小を改善
①機構の剛性を高める
前回、位置ループゲインKp(サーボ系の応答)を高くすることで円弧縮小を
軽減できることを近似式からお話ししました。
これには機構の剛性を高めることが必要です。
機構の剛性はこのようなことで高めることができます。
・バックラッシュなどの不感帯をなくす
・機構のたわみやバネ要素を小さくする
・慣性や重量を小さくする
・摩擦などの外乱を小さくする
②補間加減速の時定数を小さくする
補間加減速も位置ループゲイン(Kp)と同様の仕組みで円弧の縮小を
発生させます。補間加減速の時定数(s)=1/ゲイン(r/s)の式となるためです。
つまり、補間加減速の時定数を小さくすることで円弧の縮小を
改善できます。
軌跡精度を良くしたい場合、以下の順番で補間加減速の時定数を
最小にしてください。
1、補間時定数=0msec
2、直線型補間加減速
3、指数型補間加減速
※同じ時定数でも直線型の場合、指数型補間加減速と比べて
軌跡の内回りへの影響が小さいです。
③補間前加減速(自動コーナーオーバーライド)※オプション機能※
補間の連続での速度変化(加速度)の度合いに応じて、自動的に最適な減速/加速をします。
速度変化が小さなコーナーでは減速しません。
④形状補正※オプション機能※
サーボ系の遅れを補償した指令をします。フィードフォワード制御に似た機能です。
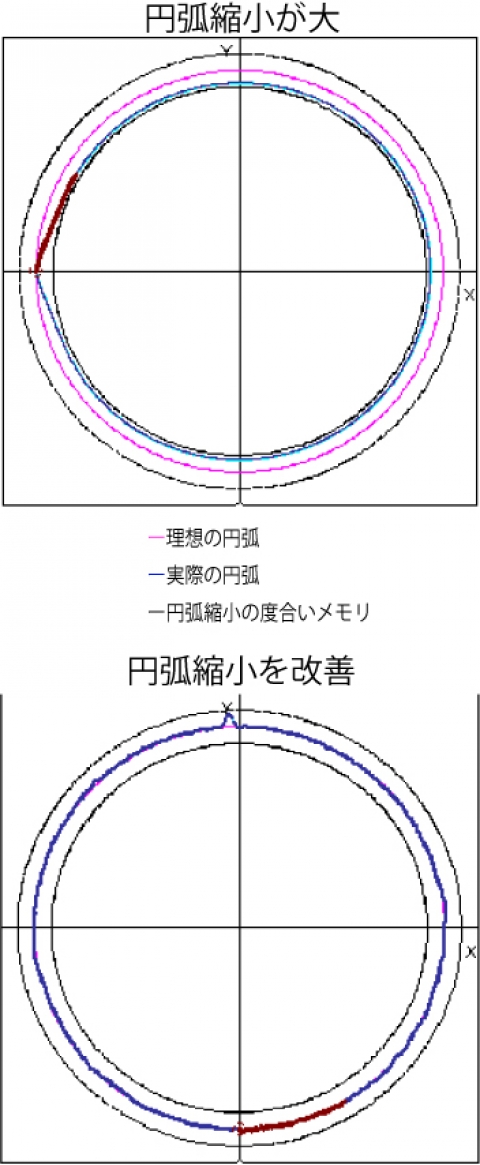
これら①~④を実施した場合の効果を右図に示しています。
上図の「円弧縮小が大」では理想の円弧(ピンク線)と比べ実践(青線)が内側に縮小していることが分かります。
しかし、下図では①~④を実施したため、実践(青線)が理想の円弧(ピンク線)と同等であることが分かります。
なお、これらの計測はテクノのモーションコントローラのTPCロギングと解析ソフトにより計測しています。
●円弧のひずみを改善
①位置ループゲインのバランス
多軸軌跡制御では、各軸の位置ループゲインが一致していることが重要です。
各軸の位置ループゲインが異なると非常に大きな軌跡誤差が生じます。
また、位置ループゲインを限界以上にすると発振などの異常動作となるため
各軸の位置ループゲインの最小値に合わせることになります。
輪郭制御を向上させるには!?① 【モーションコントローラ】
テクノの野崎です。
最初のテーマは「輪郭制御」についてです。
レーザ加工、高精度搬送、塗布、カッティング、精密実装など様々な分野で高精度な輪郭制御が必要となります。
ところが、高速でコーナーを回ると、円弧の縮小や円弧のひずみにより軌跡誤差が発生してしまいます。
これでは、カッティングしたワークの形状がいびつになったり、目標物に塗布が出来なかったりと、思い通りの成果がだせません。
本テーマでは「円弧の縮小」や「円弧のひずみ」はなぜ起こるのかをお話した後に、これらの改善案を複数回に分けてご紹介していきます。
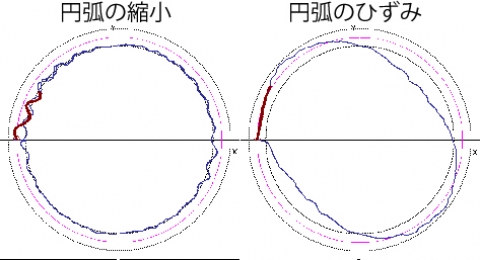
●円弧の縮小とは
円弧の縮小とは、コーナーを回る時に理想の軌跡よりも内回りすることを指しています。
右上の絵「円弧の縮小」から真円の軌跡に対して内回りとなっていることが分かります。
特に加工の分野においては、この円弧の縮小を改善できるかが大きなテーマと言えます。
円弧縮小の近似式は以下の式になります。
ΔR=0.5×F^2/(Kp^2×R)
R:半径 F:送り速度 Kp:位置ループゲイン(r/s)
つまり、F(送り速度)を遅く(小さい値)するか、Kp(位置ループゲイン)を大きくすることで円弧の縮小 R を小さくすることができます。
●円弧のひずみとは
円弧のひずみとは例えば、円を描く動きをさせようとした際に、45度傾いて楕円のような軌跡になることを指します。
右上の絵「円弧のひずみ」がそうです。
これは位置ループゲインが各軸(右上の絵の場合、X軸とY軸)異なる場合、発生します。
次回は円弧の縮小や円弧のひずみの改善策をご紹介します。
技術コラムについて
はじめまして。
テクノの野崎です。
2013年10月31日にテクノのHPをリニューアルしてから2ヶ月近くたってコラムを書く次第となったこと、まずは申し訳ありません。
本コラムではモーションに関わる"いろいろなこと"を記載していきたいと考えています。
"いろいろなこと"とは?と疑問に思われるかもしれませんが、「そんなこと知ってるよ!」といった内容から「へー、そうなんだ!」と思って頂けるような内容まで幅広く掲載出来ればいいな、と考えています。
ゆくゆくはお客様から「○○○って何?」、「△△△ってどういうこと?」など実際にお聞きした内容を記載できればうれしいです。
本コラムの内容だけでなくHPの内容などについて疑問点やご不明点があればお気軽にお問い合わせください。
それでは、今後とも宜しくお願いします。

- お電話でのお問い合わせ【受付時間】平日9:00~17:00

- メールでのお問い合わせ24時間受付 / 電話受付時間外のお問い合わせはこちらから

