














【テクノ言語とG言語のご紹介⑤】テクノ言語のサンプル紹介(インクレ直線補間「LIN」)
テクノの野崎です。
今回はテクノ言語やG言語における「インクレ直線補間命令」のサンプルをご紹介します。
※テクノ言語やG言語は1行1動作の形式でプログラムを作成します。
サンプル:「インクレ直線補間命令」
直線補間命令は「LIN(Linearの略)コマンドを使用します。」
直線補間命令は下記のようなときに使用します。
・速度を指定して軸を移動させたい
・移動軌跡を直線にしたい
・お互いの軸を同期させて動かしたい
指令した全ての軸が、同時に移動を開始して、同時に移動を終了します。
微小な直線補間を連続させることで、自由曲線を描くことも可能です。
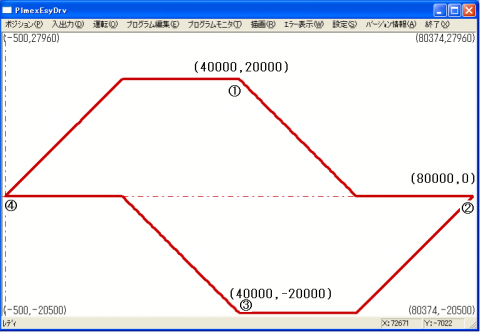
右上図は①→②→③→④を目標位置とし、順番に直線補間で移動した場合の軌跡を示しています。
その際のプログラムは下記になります。
==========================
①:LIN X40000 Y20000 F40000:
【①:G01X40000Y20000F40000;】
②:LIN X40000 Y-20000;
③:LIN X-40000 Y-20000;
④:LIN X-40000 Y20000;
END;
【】は代替するG言語命令
==========================
前回ご紹介したPTPのようにXやYなどの軸を指定し、各軸の移動量[pulse](1pulseを1μmや0.1μmに設定可能)を設定します。また、①のように「F」にて速度[pulse/sec]を指定することも可能です。
指定のない軸は移動を行いません。
次回は円弧補間命令のサンプルをお伝えします。
▼テクノ言語にご興味のある方:テクノ言語運転プログラムをぜひ、ご確認ください。
▼テクノ言語/G言語の対応リストもあります。
【テクノ言語とG言語のご紹介④】テクノ言語のサンプル紹介(インクレ位置決め「PTP」)
テクノの野崎です。
GWが始まりました。
今年のGWは晴れる日が多いみたいです。
外出するにはうってつけです!
さて、今回も「テクノ言語とG言語のご紹介」シリーズです。
前回は運転プログラムの実行についてお伝えしました。
今回はテクノ言語のサンプルを紹介したいと思います。
併せてG言語のサンプルも記載します。
テクノ言語やG言語は1行1動作の形式でプログラムを作成します。
サンプル:「インクレ位置決め命令」
位置決め命令は「PTP(Point to Pointの略)コマンドを使用します。」
各軸を任意の位置に位置決めするときに使用します。
各軸はそれぞれ独立して設定した速度・加減速(サーボパラメータ)で移動します。
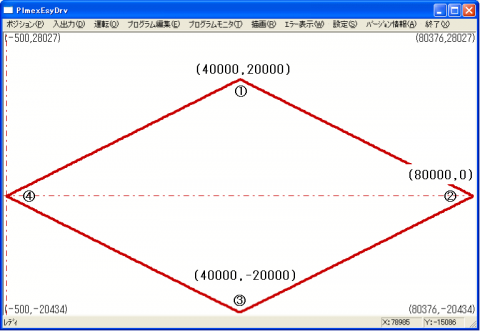
右上図はX軸、Y軸の速度を同じとし、①→②→③→④の順で目標位置に移動した場合の軌跡を示しています。
その際のプログラムは下記になります。
==========================
①:PTP X40000 Y20000:
【①:G00X40000Y20000;】
②:PTP X40000 Y-20000;
③:PTP X-40000 Y-20000;
④:PTP X-40000 Y20000;
END;
【】は代替するG言語命令
==========================
上記のように
PTPの後にXやYなどの軸を指定し、各軸の移動量[pulse](1pulseを1μmや0.1μmに設定可能)を設定します。
※G言語の場合はG00を使用します。
指定のない軸は移動を行いません。
次回は直線補間命令のサンプルをお伝えします。
▼テクノ言語にご興味のある方:テクノ言語運転プログラムをぜひ、ご確認ください。
▼テクノ言語/G言語の対応リストもあります。
PLCモーションコントローラの高速版が出ました!!【モーションコントローラ】
弊社ホームページをご覧頂きありがとうございます。
テクノの山中裕貴です。
多くのお客様にご好評頂いているPLCモーションコントローラ(PLMC-MⅡEX / PLMC-M3EX)に高速版(PLMC-MⅡEX-F / PLMC-M3EX-F)ができました!
最高クラスのCPUを使用しており、CPU性能が従来比1.4倍です!
高度なマルチタスク処理で制御周期4msec以内に収まらなかったお客様の装置では、高速版になったことで、3msec以内までに改善し、今までの軸数でさらに高速な制御が可能になりました。
その他にも、制御周期に余裕が生まれたため、現状の制御性能を落とさずに軸を追加することで、位置決めモジュールを1つ減らすなどのことができるかもしれません!
計算量の多い特殊な補正や複雑なロボット演算などに効果絶大です!
お客様の装置の可能性をまた一歩、向上して頂けると思います。
ご興味のあるお客様はぜひお問い合わせください。
テクノGW休暇のご案内
テクノGW休暇のご案内
2014年4月21日
株式会社テクノ
拝啓 時下益々ご清栄のこととお慶び申し上げます。平素は格別のお引立てを賜り、厚く御礼申し上げます。
誠に勝手ながら、GW休業のため、下記期間におけるお問合せ対応及び発送業務をお休みさせていただきます。
何卒ご了承くださいますようお願い申し上げます。
■GW休業期間■
2014年4月27日(日) ~2014年5月5日(月)
■お問合せ・発送業務対応について■
お休み期間中にいただいたお問合せ・発送業務依頼は、
2014年5月6日(火)より順次ご対応させていただきます。
回答までにお時間をいただく場合がございますが、予めご了承下さい。
お客様にご満足いただける製品とサービスの提供を目指し、社員一同より一層努力して参ります。
今後共、変わらぬご愛顧の程、宜しくお願い申し上げます。
敬具
【テクノ言語とG言語のご紹介③】運転プログラム実行編
テクノの野崎です。
今回も「テクノ言語とG言語のご紹介」シリーズです。
前回は運転プログラムの設定についてお伝えしました。
今回は運転プログラムをどのように実行するのかについてご紹介します。
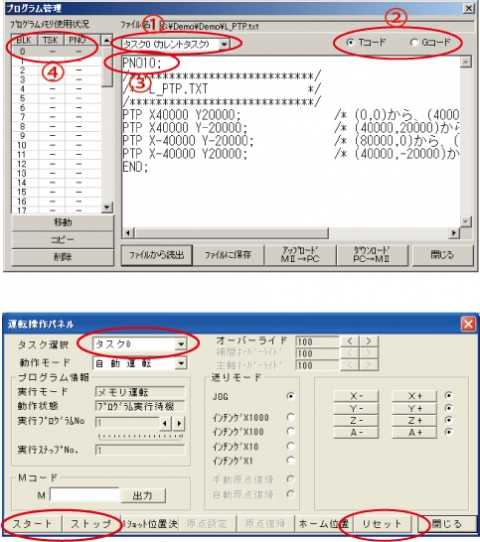
※右図はPLCモーションコントローラ(PLMC-M3EX)を例にご紹介します。
※他コントローラでも同様の操作で実行可能です。
編集が完了したら右図(上)の
①:タスク
②:テクノ言語(Tコード)、G言語(Gコード)
③:プログラム番号
を設定します。
続いて
④:ダウンロードするブロック
を選択し、ダウンロードをクリックします。
ダウンロードが完了したら右図(下)の画面にて
タスクの選択が正しいことを確認します。
そして、「スタート」をクリックすることで運転を実行します。
もし、途中停止したい際は「ストップ」、中断したい際は「リセット」をクリックします。
【関連資料】
▼デモ機を無料で貸出しています。デモ機貸出についてはこちら
テクノ言語、G言語プログラムの体験などができます。
▼セッティングPCソフトには「サンプル運転プログラム」がついています。ご興味のある方は是非お読み下さい。
※閲覧には会員登録が必要です。
▼テクノ言語にご興味のある方:テクノ言語運転プログラムをぜひ、ご確認ください。
▼テクノ言語/G言語の対応リストもあります。

- お電話でのお問い合わせ【受付時間】平日9:00~17:00

- メールでのお問い合わせ24時間受付 / 電話受付時間外のお問い合わせはこちらから

